Project: Brownian Motion on Manifolds
Faculty supervisor: Cheng Ouyang
Graduate mentor: Alex Cameron
Student researchers: Henry Besser and Branden Carrier
Description: Brownian motion is a term originally used to describe the irregular movement of pollen suspended in water, as observed by the botanist Robert Brown. It was first mathematically constructed by Norbert Wiener in 1923 (hence it also called the Wiener process), and this process plays an important role in both pure and applied mathematics.
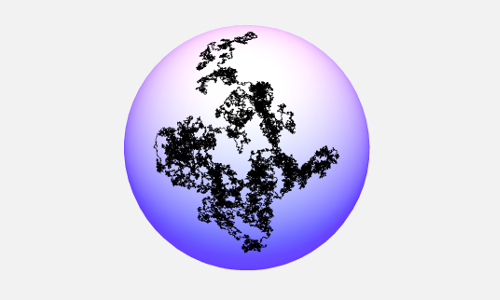
In this project, we will first learn how this random movement is defined on curved spaces (called Brownian motion on manifolds). Then we will simulate this process on various manifolds, using these simulations and visualization techniques to illustrate some known properties of Brownian motion and to explore some unknown properties.
Outcomes: This semester, we examined the properties of Brownian motion on Riemannian manifolds, with a particular focus on justifying numerically Birkhoff’s Ergodic Theorem. We achieved our goals thus: 1) We simulated a Brownian motion on $S^2$ and provided a 3-dimensional depiction of its walk; 2) Having chosen a real-valued function defined on $S^2$, we plotted the time-average of the function on the path of the Brownian motion over an interval of time, in order to see if it approaches the space-average of the function. Visualizations confirmed that the Brownian motion visited every part of the sphere, and graphs of the time-average over time confirmed that it approached the space-average after a sufficient amount of time.
Materials and resources:
Project: Tangle Toy Moduli
Faculty supervisor: David Dumas
Student researchers: Sarah Ather and Rolando Medellin
Description: In creating a mathematical model of a mechanical device (e.g. a chain, a lever, a system of gears, or a robotic arm) it is often useful to study the range of all possible positions of the components of the device. This idea is made precise in the notion of a configuration space. The quantities that determine the relative positions of the components become coordinates functions of the configuration space, and these are called moduli.
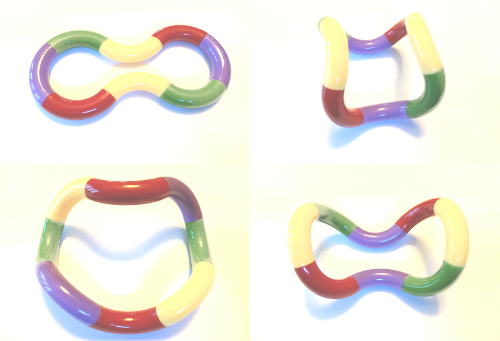
In this project, students will study the configuration spaces and moduli associated to a specific family of symmetric mechanical linkages in which quarter-circle arcs are connected by joints that allow rotation (as pictured above). We will see that these simple objects (which are often sold as desk toys) have a rich mathematical story behind them—one that involves ideas from calculus, geometry, and topology. After surveying the existing literature on this topic, students will build an online tool for visualizing the correspondence between points in the configuration space and shapes of the object itself.
Outcomes: The focus of this project was to create a visualization companion to the theoretical results in a research paper of Kasra Rafi and Gemma Zhang on the moduli space of the eight-link tangle toy. We created such a program using Javascript and Three.js that visualizes the configurations studied by Rafi-Zhang, and more generally, which lets users visualize any configuration of up to fifteen links.
Materials and resources: